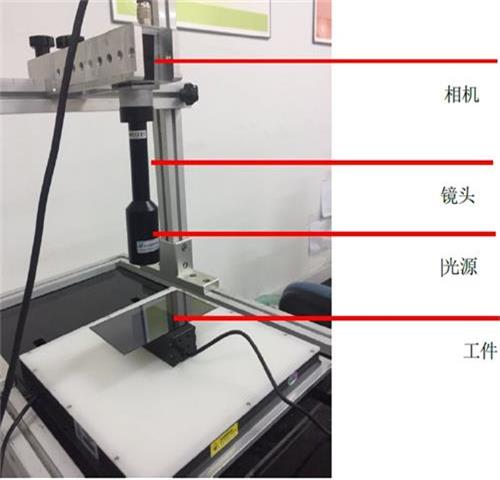
测试系统构成:

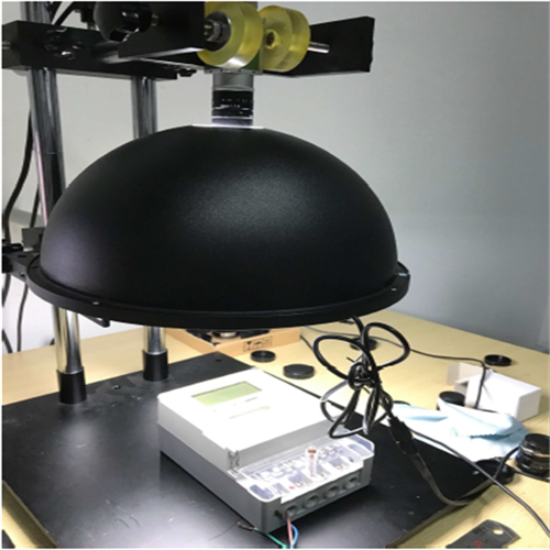
相机选择研华500万像素相机,以太网接口,镜头选择物方远心镜头,光源选择同轴光源,保证视野范围内光照的均匀。安装完毕后相机视野约为5.2mm*4.7mm,上图为测量系统的示意图。(计算机选取研华工控机,可以实现1拖2台相机)。下图为实验室实物图。

软件处理方案介绍
整个图像处理软件平台采用研华的Inspect Express软件平台。整个系统的控制流程如下:

由于条件限制我公司采用了一台100万像素的相机进行了初步的原理性开发。光源与镜头均采用报价单中的实际型号。
1、对相机进行标定,得到图像像素与机构的运动坐标系进行换算,以便通过图像直接得到图像的尺寸和坐标。具体的标定方案需与运动控制部分沟通,建议在工作区域采用设置基准信标点,这样可以实现自动标定。下图为本公司在自有试验台进行划线基准测量后的标定结果。

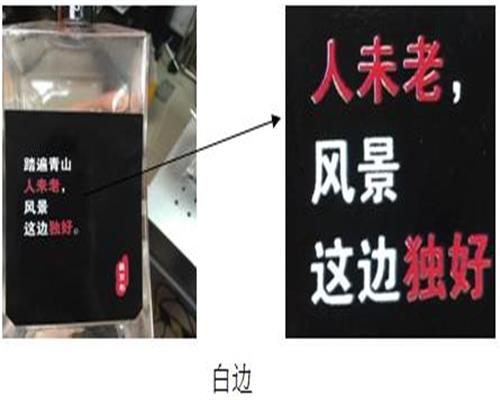
2、图像采集,图像采集主要采用触发控制,当机构部分运动到位后发送触发信号,触发可以采用硬件触发(电平、脉冲),也可采用软件触发(通过以太网发送触发信号)。下图为我们采集到的原始信号。





3、 先对采集到的图像进行相应的预处理,去除噪声。然后通过模板匹配的方法对采集到的图片进行匹配,找到要定位的目标,并计算其坐标。通过选取模板匹配工具,在图像中将会产生两个框,外面的黄色框代表是每幅图像将要进行匹配的范围,里面的绿色框表示模板匹配需找到的目标,同时拟合出目标的中心,通过标定结果即可计算出目标二维坐标。

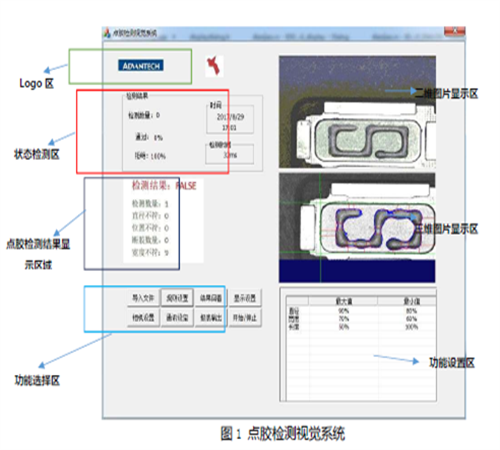
4、当目标未出现在视野时也设置了相应的处理机制,状态区就会显示“FAIL”

5、 该方案对每幅图像的处理速度都较快,大约在10ms-25ms之间。处理速度可从界面上可知,如图所示:第一幅是成功将目标处理出来的,第二幅是图上没有目标的。将来如果采用500万像素相机,速度应该在300ms之内,完全满足系统要求。


6、数据传输可以通过以太网传输,如下图所示。